Development of a Modular Actuator for Hip and Ankle Joint
What:
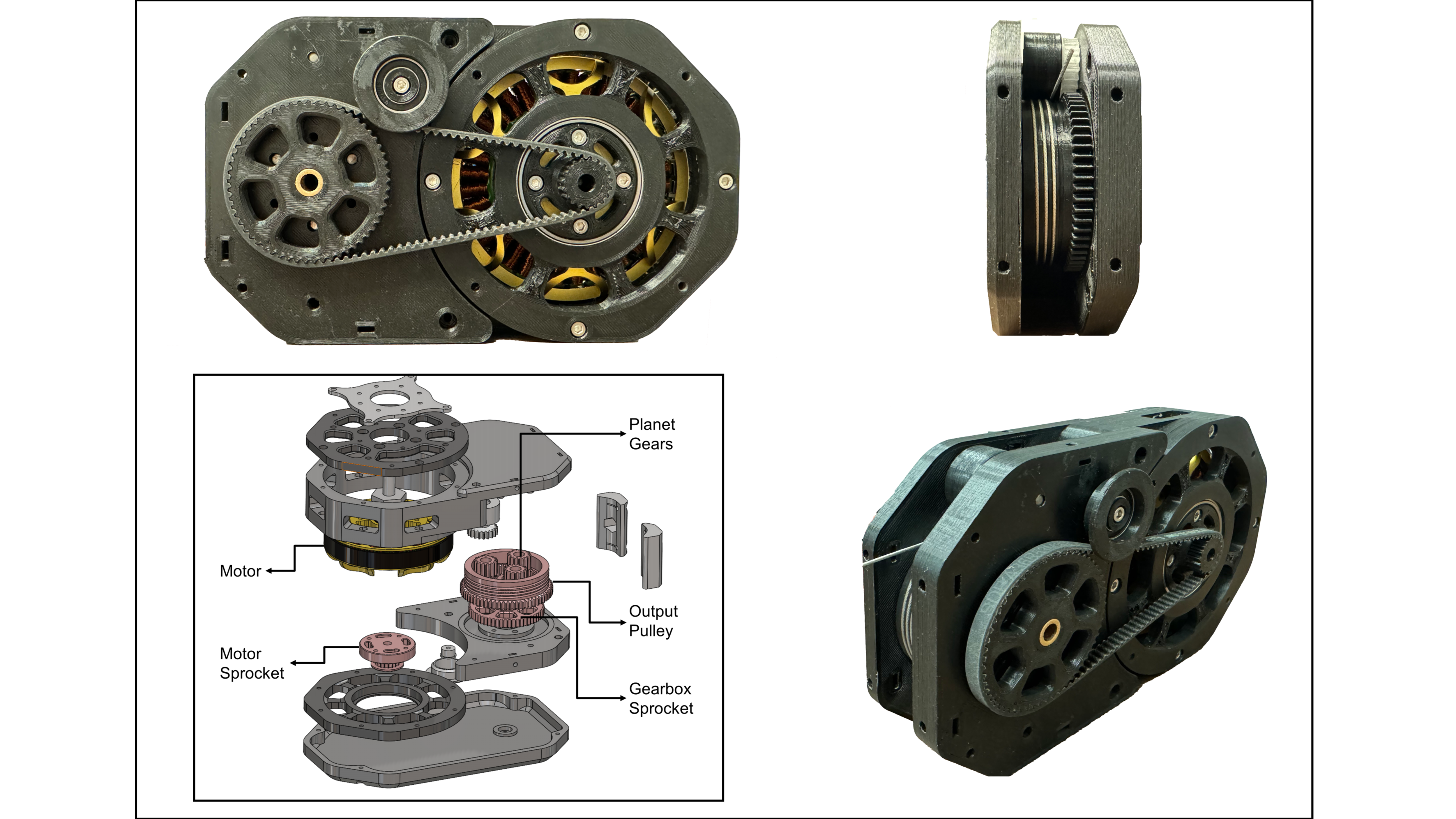
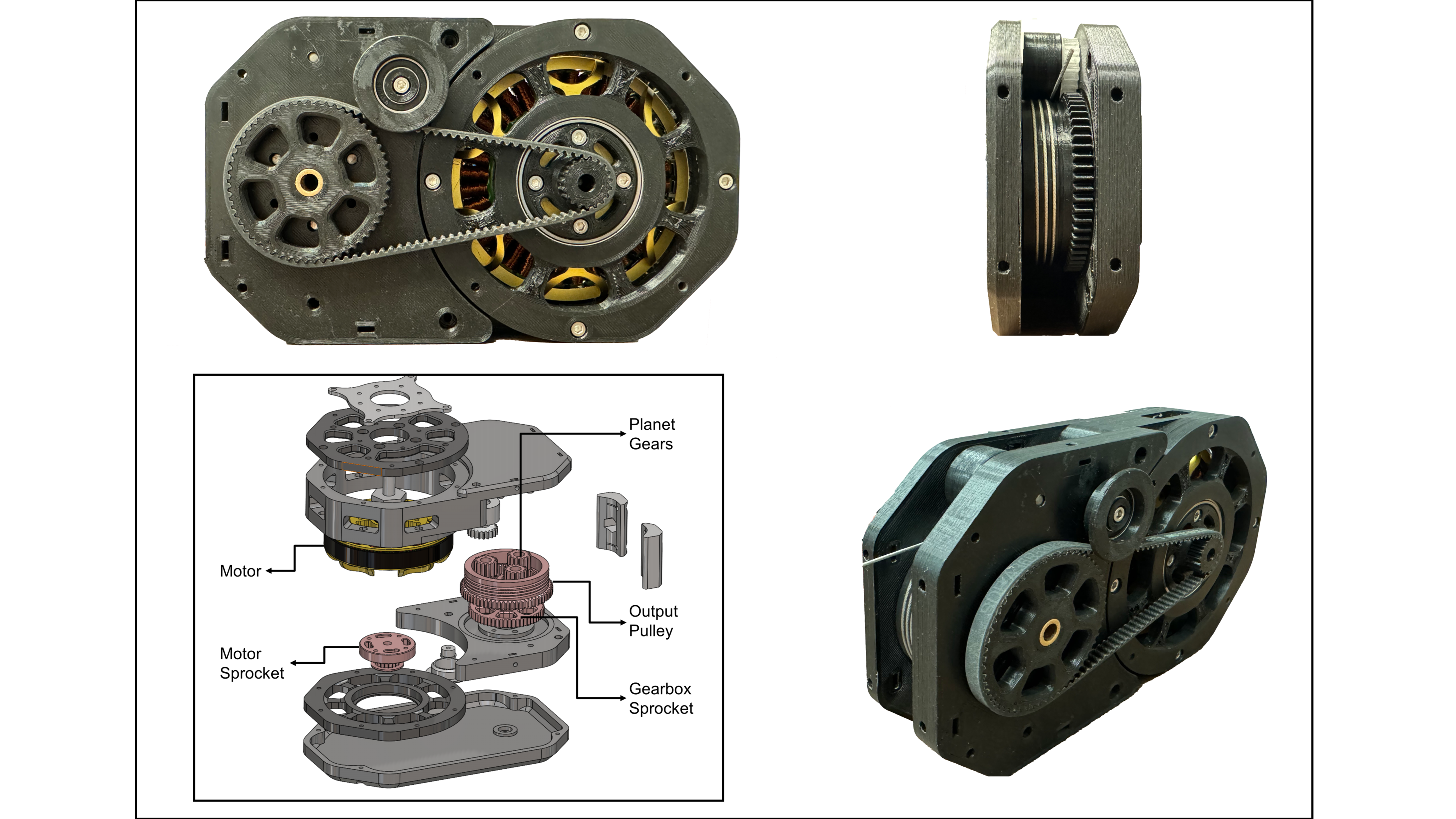
This project presents a novel actuator designed for the hip and ankle joint, integrating a 90 KV BLDC motor driving a gearbox with a 9:1 overall reduction ratio. The actuator offers significant force generation capabilities and precise force control, enhancing mobility aids without requiring external balancing forces.
How:
The actuator features:
- Components: Includes a 3:1 belt reduction and 3:1 planetary gearbox distributed across two stages of reduction.
- Slack Enabling Mechanism: Facilitates precise force control of the cable without external balancing forces, enhancing versatility and usability.
The development process involved:
- Design: Detailed design of components and calculations for optimal performance.
- Fabrication: Manufacturing with high precision to ensure efficiency and reliability.
- Testing: Rigorous testing to validate force generation and precise force control capabilities.
Results:
The actuator achieves impressive results:
- Hip Torque: Up to 16 Nm at a current of 10 A, supporting a range of motion for the hip joint.
- Ankle Support: Enhanced mobility aid capabilities without hindering natural joint movements.
These outcomes highlight the actuator's effectiveness in supporting joint movements and enhancing mobility aid devices for hip and ankle functions.