Design and Validation of a Variable Stiffness Spiral Cam Actuator (Accepted at ICRA 2024)
What:
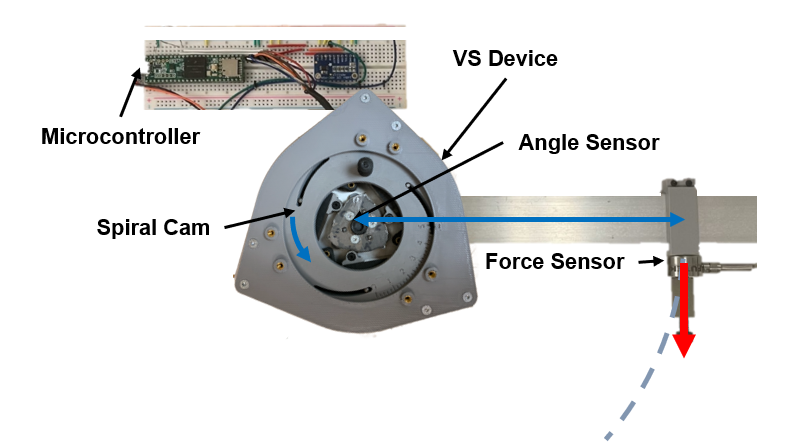
This project introduces the Variable Stiffness Spiral Cam Actuator (VS-SCA), a specialized actuator designed to assist individuals with limited ankle function during walking. The key innovation is the ability of the actuator to vary its stiffness, which is crucial for aiding different phases of ankle movement, enhancing mobility aid devices compared to traditional constant-stiffness actuators.
How:
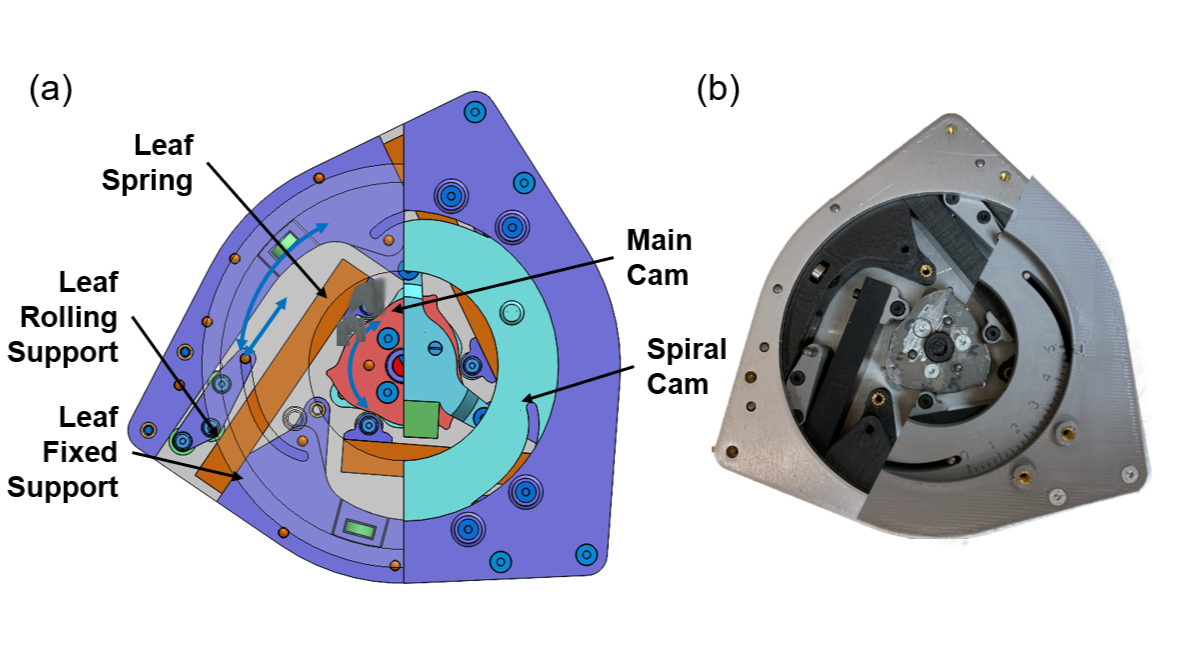
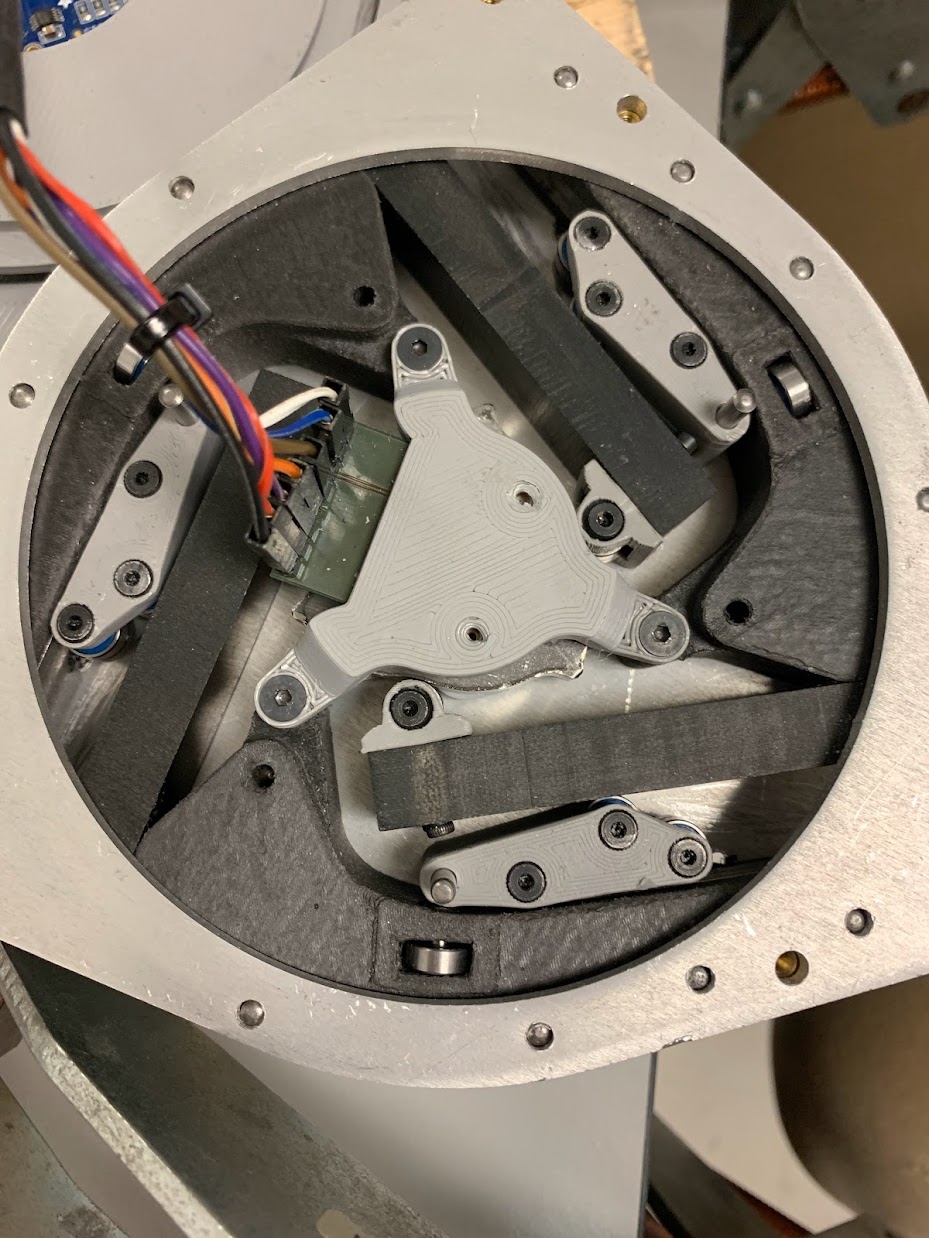
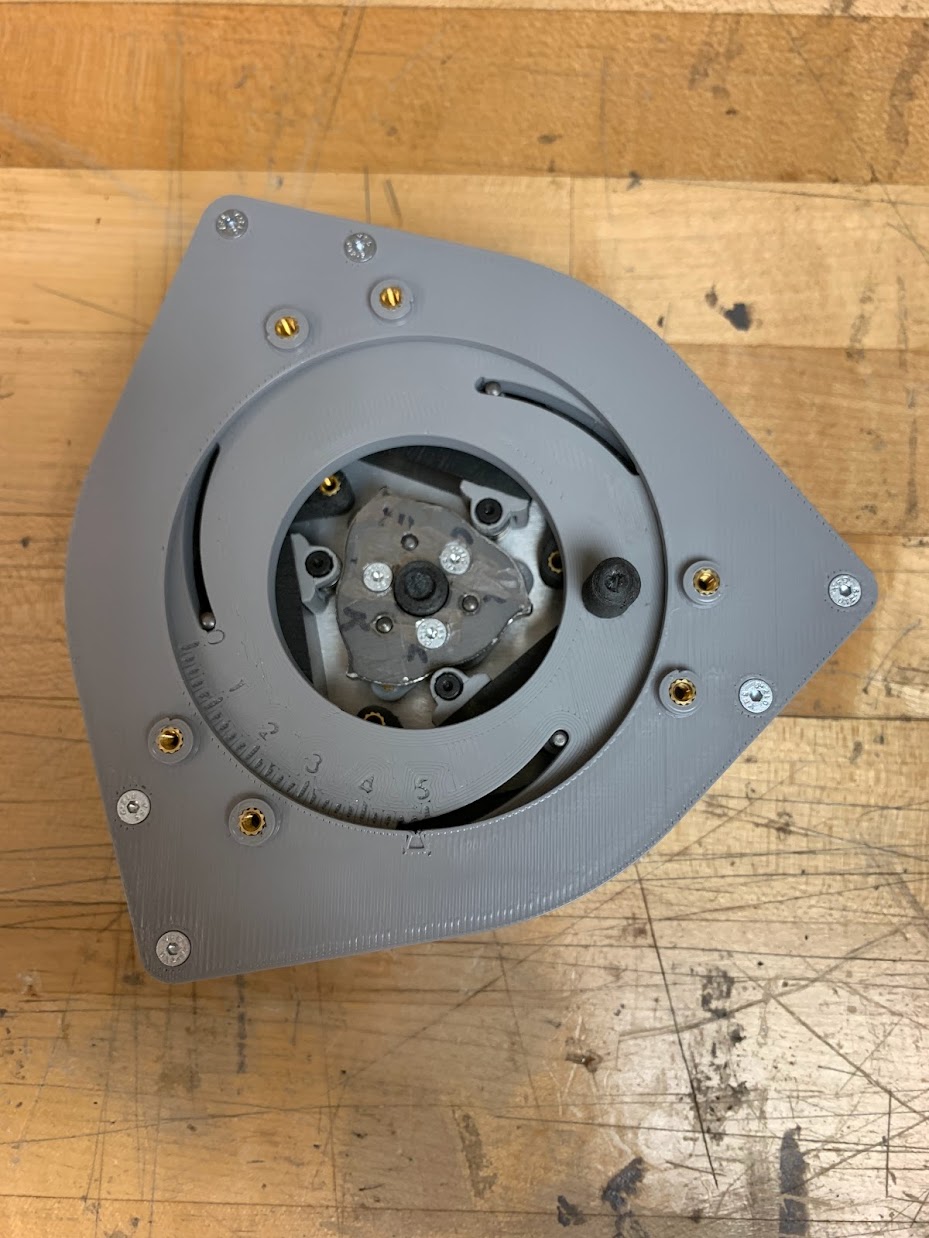
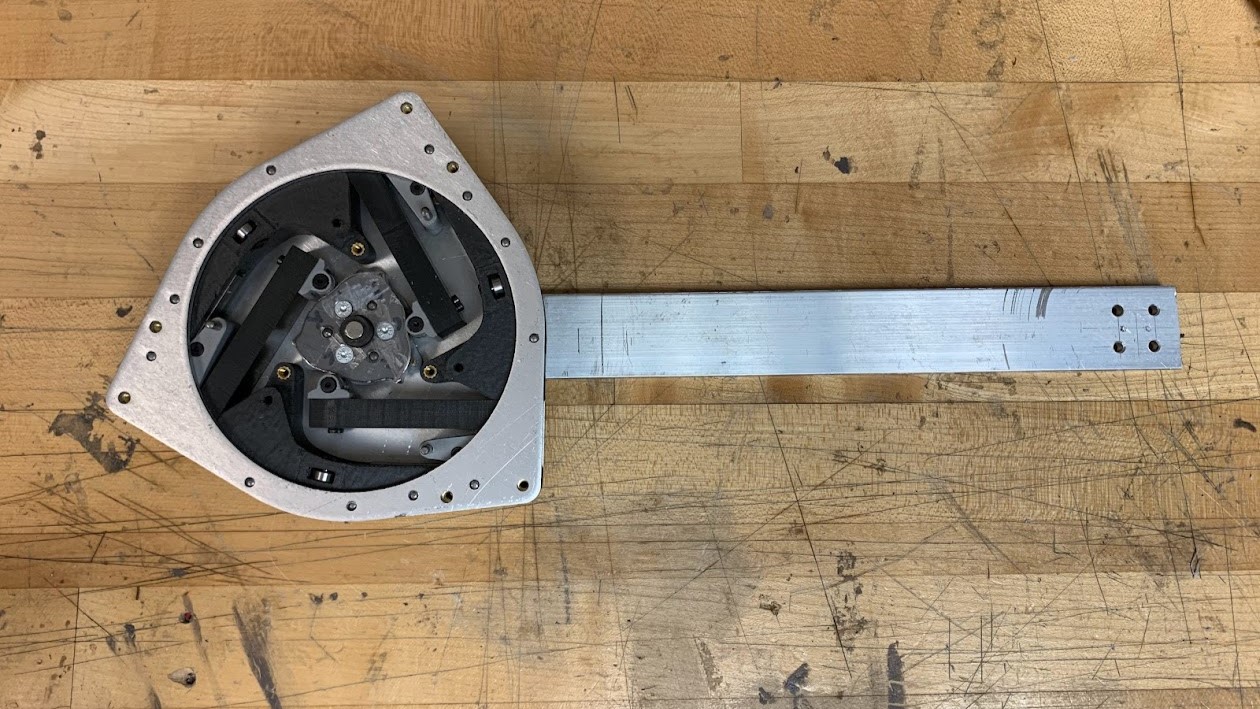
The VS-SCA utilizes multiple cam mechanisms to achieve variable stiffness:
- Cantilever Beams: Integral to the actuator's structure, providing necessary flex and resistance.
- Main Cam Mechanism: Core component interacting with cantilever beams to adjust stiffness.
- Archimedean Spiral Cam: Specialized cam providing variable stiffness by interacting with cantilever beams at different points along its spiral shape.
The development process involved:
- Design: Careful consideration of overall system design, including precise calculations for beam and cam dimensions.
- Fabrication: Manufacturing components with high accuracy to ensure proper functionality.
- Validation: Rigorous testing to verify that the actuator performs as intended, focusing on its ability to provide variable stiffness.
Results:
Experimental testing demonstrated that the VS-SCA can adjust its stiffness effectively, offering:
- Dorsiflexion Stiffness: Range of 20 to 75 Nm/rad, beneficial for supporting ankle movement during dorsiflexion phase of walking.
- Plantarflexion Stiffness: Lower range of 4 to 12 Nm/rad, essential to avoid hindering natural ankle motion during plantarflexion phase.
These results indicate that the VS-SCA successfully provides necessary support for ankle movement, enhancing functionality of mobility aids for individuals with limited ankle function.